3.5.S Optimal Braking Distance
Introduction
This section shows how I computed the optimal solution. It was quite a hassle, I needed to play with different approaches and to fight with maple... But after a day of thinking and playing, here it is. So I finally provide you a better solution than my robot berniw currently contains.
Braking Distance
 First I developed a differential equation for v(s). Then I solved it with maple and got
a function for v(s) with initial condition v(0)=v1. Finally I solved the function with v(s)=v2 for s, and that's it. I
also compared and checked the result with the numerical approach.
First I developed a differential equation for v(s). Then I solved it with maple and got
a function for v(s) with initial condition v(0)=v1. Finally I solved the function with v(s)=v2 for s, and that's it. I
also compared and checked the result with the numerical approach.
Discussion
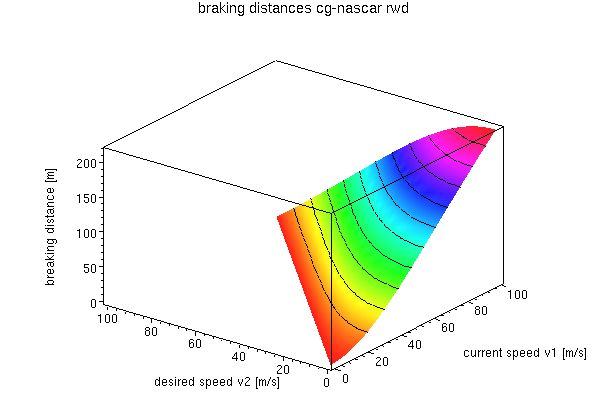
The plot shows the braking distance s as a function of the current speed v1 and the
desired speed v2 (for cg-nascar-rwd). In fact I was a bit surprised of the shape of the surface. Why? Because
the kinetic energy of the car grows proportional to the square of the velocity. What makes
now the surface that flat?
Have a look at the forces: In the formulas with aerodynamics we have additional
terms for the aerodynamic forces which also grow proportional to the square
of the velocity. At high speeds they dominate, so we can also burn energy at
"squared rate". Keep in mind that we neglect a lot of effects like:
- Load transfer caused by the negative acceleration during braking.
- Braking balance.
- Aerodynamic load changes differently at front and rear.
- Rotational kinetic energy of the wheels.