3.5 Advanced Braking
Introduction
This section is about braking with aerodynamic forces. Because we have aerodynamic downforce and drag we will be able to brake later. That was also the reason of the brake "flickering" on high speeds. Because more energy is absorbed than we expect, we reach the goal speed too early, so we stop braking. A moment later we are again too fast, and need to brake again, and so on... Don't run away because of the scary formulas, they are not too hard to understand.
Braking Distance
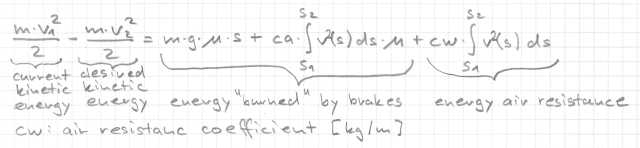 Let's have a look at this funny equation. You already know the first three terms on the
left from section 3.2 ("brakes 1"). We still have to burn the energy difference in the
brakes. The second term from the right describes the additional energy we can "burn" in
the brakes caused by the downforce which acts on the wheels.
Because the speed changes over the braking distance I formulate it with an integral.
Let's have a look at this funny equation. You already know the first three terms on the
left from section 3.2 ("brakes 1"). We still have to burn the energy difference in the
brakes. The second term from the right describes the additional energy we can "burn" in
the brakes caused by the downforce which acts on the wheels.
Because the speed changes over the braking distance I formulate it with an integral.
 The rightmost term describes the
energy which is used by the drag. The drag is like the downforce a function of the squared
speed, so we also need an integral.
Because I had no idea how to solve this equation for
s (=s2-s1, so one could also put the first term on the right into an integral), I will present
an approximation. Meanwhile I found the optimal solution.
The rightmost term describes the
energy which is used by the drag. The drag is like the downforce a function of the squared
speed, so we also need an integral.
Because I had no idea how to solve this equation for
s (=s2-s1, so one could also put the first term on the right into an integral), I will present
an approximation. Meanwhile I found the optimal solution.
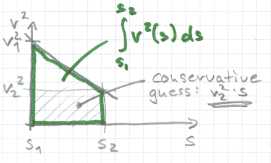
Like you can see on the left sketch, I make a bad guess for the area
of the integral. I simply take the rectangle with the size v2^2*s, which will be always too
small. That's exactly how it works in the berniw robot. You can improve that by inserting
some velocities and integrate numerically over more steps.
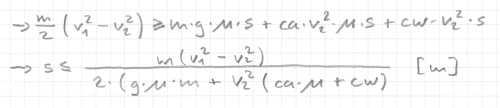
Now we put this easy expression into the top formula. We will find an upper bound
for the braking distance s. Doesn't look dangerous anymore, doesn't it?
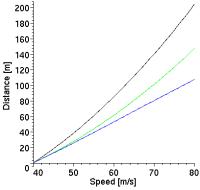 This time the improvement is small, on e-track-4 we win around one second. It's because
our formula works only well for small speed differences at high speeds. If you want better
results you need to split the range of [v1..v2] into more intervals or implement the
This time the improvement is small, on e-track-4 we win around one second. It's because
our formula works only well for small speed differences at high speeds. If you want better
results you need to split the range of [v1..v2] into more intervals or implement the